Open-World Novelty Detection, Characterization, and Accommodation
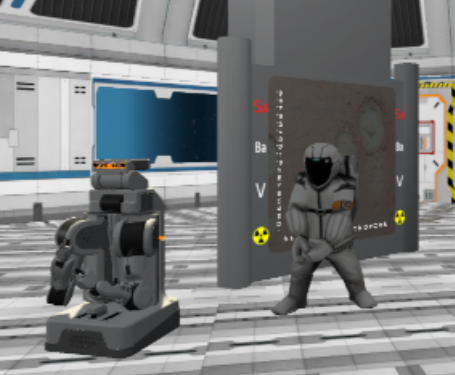
Open-world AI requires artificial agents to be able to handle novelties that arise during task performance, i.e., agents must detect novelties and characterize them in order to be able to accommodate them effectively, especially in cases where sudden changes to the environment make task accomplishment impossible without utilizing the novelty. In this project, we are developing algorithms for all aspects of a formal framework and implementation thereof in a cognitive agent for novelty handling and demonstrate the efficacy of the proposed methods in various open-world tasks, including a crafting task in Minecraft.
Keywords: novelty handling, fault detection, fault recovery, problem solving, life-long learning, diarc