
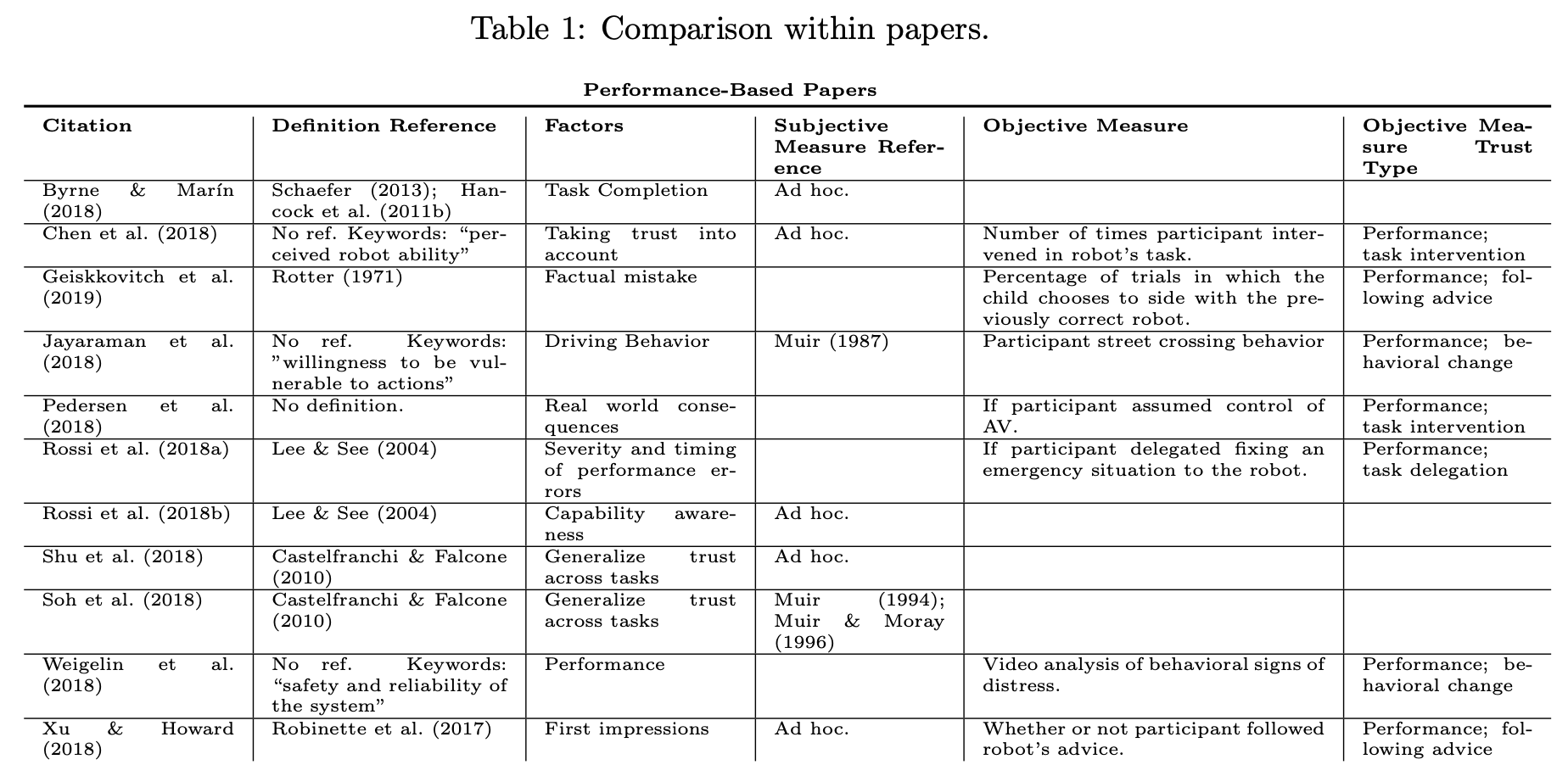
We present a survey of the current empirical literature on trust in HRI. We categorize trust as being either performance-based or relation-based. We compare how each paper in our survey uses performance- or relation-based trust in their trust definitions, research questions, and trust measurements.
@incollection{law2020trust,
title={Trust: Recent Concepts and Evaluations in Human-Robot Interaction},
author={Theresa Law and Matthias Scheutz},
year={2020},
booktitle={Trust in Human-Robot Interaction: Research and applications},
publisher={Elsevier},
url={https://hrilab.tufts.edu/publications/law2020trust.pdf}
}