
A Framework for Robot Self-Assessment of Expected Task Performance (2022)
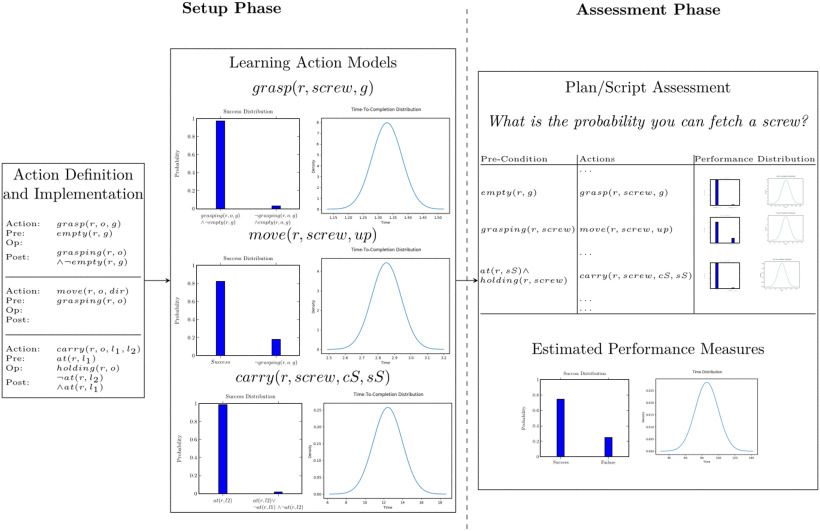
We propose a self-assessment framework which enables a robot to estimate how well it will perform a known or novel task. The robot simulates the task by sampling performance distributions to generate a state distribution of possible outcomes and determines 1) the likelihood of success, 2) the most probable failure location, and 3) the…
Keywords: self-assessment, diarc, Human-Robot Interaction